Les bras de robot


Introduction et Kit de base
Un bras robotisé est simplement un bras mécanique programmable qui est très similaire à un bras humain en matière de fonctionnalité et parfois même d’apparence. Il est la combinaison de divers autres mécanismes et sous-ensembles plus petits. Les manipulateurs et les liaisons sont généralement reliés par des articulations qui permettent soit le mouvement de translation, également appelé déplacement linéaire ou mouvement de rotation.
Les bras robotiques peuvent être utilisés pour différents types d’applications et de tâches tels que :
- Production automobile : en raison de l’avancée rapide de la technologie et de l’intensification de la concurrence, en particulier dans le domaine automobile, les robots et les bras robotisés sont utilisés et adoptés par diverses entreprises automobiles telles que BMW et TESLA.
- Emballage : les grandes entreprises qui emballent des produits manufacturés utilisent des bras robotisés afin de faciliter et de faciliter le processus d’emballage.
- Électronique : les PCB (carte de circuits imprimés) produits en masse sont fabriqués à l’aide de bras robotisés afin d’accélérer le processus de fabrication.
Types de bras robotisé
Il existe différents types de bras robotisé, et ils peuvent être classés et définis en fonction de certains aspects et facteurs tels que :
- Nombre d’axes : il en existe qui ne nécessitent que deux axes pour atteindre un point.
- Degrés de liberté : certains bras peuvent être classés en fonction des degrés de liberté.
- Application : Ils peuvent également être classés en fonction des tâches et applications qu’ils effectuent ou de leur domaine d’utilisation (tels que le domaine médical, le domaine automobile…).
- Précision : tous ceux-ci n’ont pas la même précision ; ceux qui ont une excellente précision sont classés comme des robots haut de gamme.
- Source d’alimentation : il existe généralement deux types de sources d’alimentation pour les robots, soit les moteurs électriques, soit l’hydraulique.
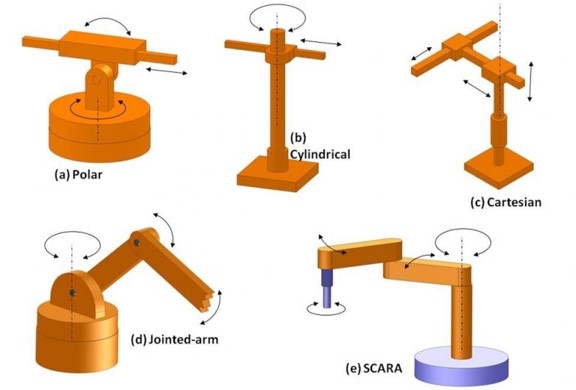
Cependant, les bras robotisés ne sont pas toujours classés de cette manière. Généralement, les bras mécaniques sont également classés en fonction de leurs mouvements dans cinq catégories :
Polaire – cylindrique - cartésien - bras articulé - SCARA
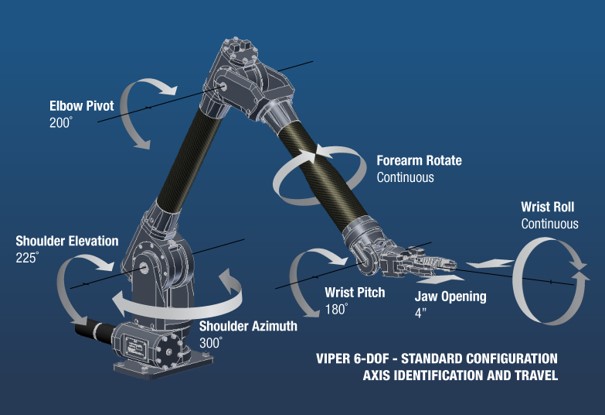
Degrés de liberté
Les robots sont conçus pour effectuer des mouvements. La quantité de ce mouvement est déterminée par les degrés de liberté (DoF) intégrés au design. Il s’agit du nombre de façons différentes dont un appendice peut pivoter.
Un bras robotisé standard est composé d’articulations telles que « épaule », « coude », « poignet ».
Bras de robot interactif
Voici un site qui vous permet de tester les fonctionnalités d’un bras articulé simple avec 3 degrés de liberté :
https://medium.com/@ongspxm/robotic-arm-simulation-a2c587c16f5e
https://ongspxm.github.io/robotic-arm/
Keyestudio 4DOF Robot Mechanical Arm Kit
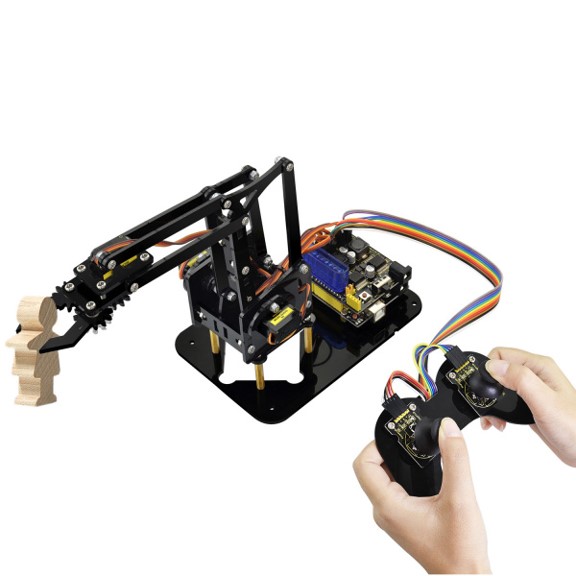
Electromike propose un kit de bras de robot de 4 DoF contrôlé par un Arduino UNO.
https://wiki.keyestudio.com/Ks0198_keyestudio_4DOF_Robot_Mechanical_Arm_Kit_for_Arduino_DIY
Présentation du kit
Comment bricoler un bras robotique pour effectuer plusieurs mouvements ?
Avec ce kit de bras robotique Keyestudio, vous pouvez bricoler votre propre bras mécanique contrôlable à l’aide du microcontrôleur ARDUINO. Il utilise REV4 et 2 modules Joystick pour contrôler le degré d’angle de 4 servos.
Lorsque vous bricolez ce kit de bras de robot 4DOF, vous pouvez obtenir tout le nécessaire pour l’installation et le débogage du bras.
Il existe 3 méthodes de contrôle :
- Contrôle via « Wired JoyStick » (inclus dans le kit) ;
- Contrôle Bluetooth du téléphone (remarque : module Bluetooth HC-06 non inclus, ne fournissez que le code de test pour Bluetooth et APP pour téléphone Android) ;
- Contrôle sans fil PS2 Joystick (module PS2 Joystick non inclus, nous fournissons uniquement le code de test.)
Si vous désirez en connaitre davantage sur les bras de robots, lisez notre blogue sur les modèles évolués ICI.
Publications reliés
OTTO le ROBOT
28 novembre, 2019| Publié dans Microcontrôleurs| 4743

Mini Smart Robot Car Kit V2
28 novembre, 2019| Publié dans Microcontrôleurs| 3394
Les bras de robot - Modèles évolués
14 f�vrier, 2020| Publié dans Général| 13979

Construction de Véhicules Autonomes
21 septembre, 2020| Publié dans Général| 9023

Construction de Véhicules Autonomes 2
21 septembre, 2020

Les bras de robot - Modèles évolués
14 f�vrier, 2020

Les bras de robot
14 f�vrier, 2020

Construction de Véhicules Autonomes
21 septembre, 2020

Kit Électronique INTERMEDIAIRE
13 f�vrier, 2020
